






















No camera on a truck sees the roof-down view that a 360 system puts on the screen. The box assembles it by assuming the ground is flat and folding each of four wide-angle lenses down onto that plane, and the assumption holds right up to the moment something stands up off the road. Knowing the limits of that flat-plane picture is the larger part of telling a useful around-view install from one the driver stops looking at by the second week.
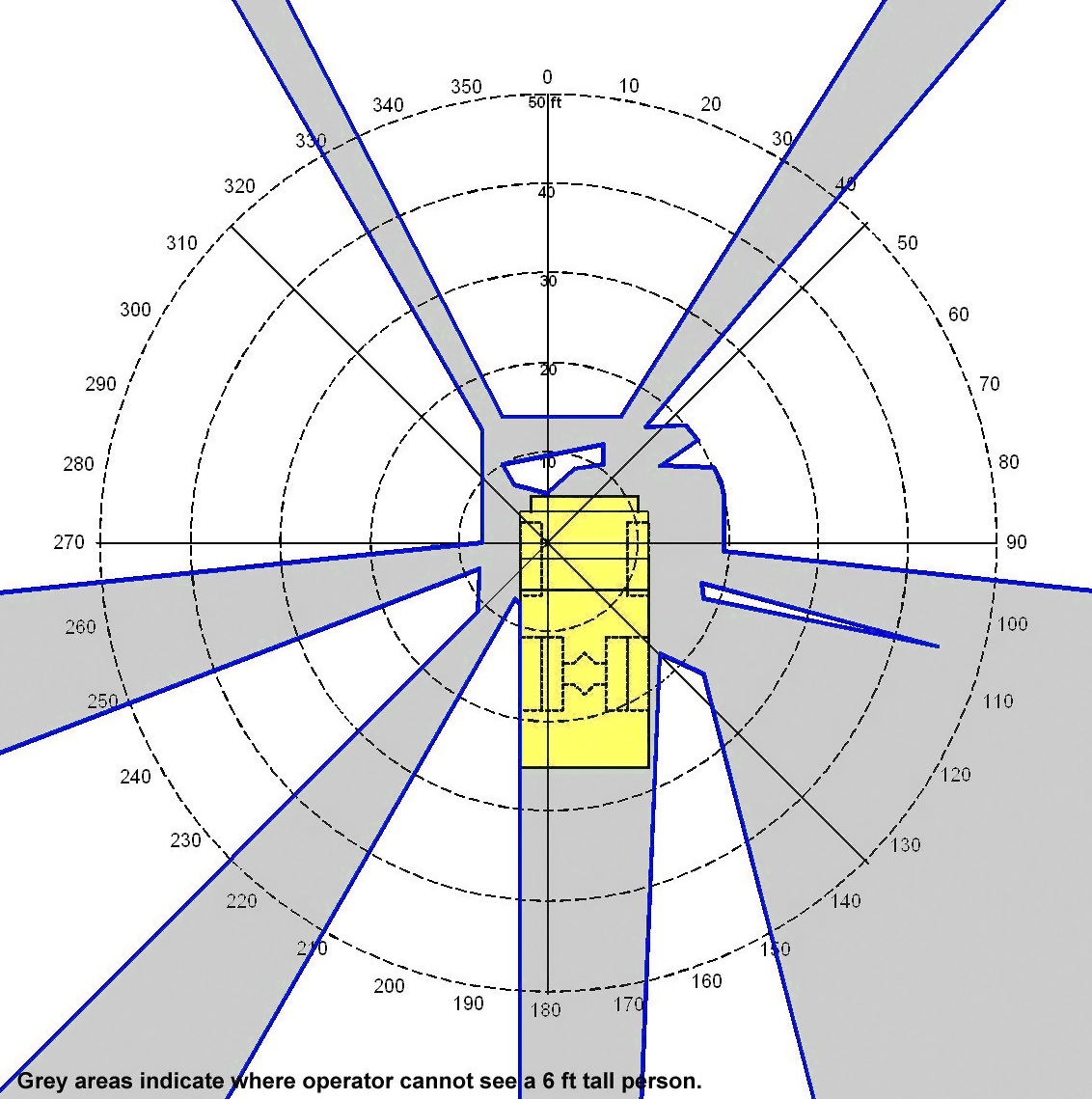
A commercial vehicle carries blind zones a car never has. A high cab hides the ground for a metre or two past the bumper. A long body keeps the middle of the nearside out of the mirrors, and the back doors blank out whatever sits close behind them. There is also a child-height gap right where a tight turn swings the wheels, and the driver cannot lean far enough across the cab to close it. The around-view monitor exists to fill that low ring of ground the driver cannot see from the seat, the metre or two of road hugging the vehicle where slow-speed damage and the worst pedestrian strikes happen.
The system earns that picture by stitching. Four cameras become one bird’s-eye image by warping each fisheye view down onto the road and laying the four flattened pictures edge to edge, so the screen shows a single plan view with the vehicle drawn in the middle as a fixed graphic. The front camera sits high on the cab or the grille, the rear over the back doors, and one camera rides under each mirror, every one of them angled steeply down so its share of the picture is mostly ground.
The geometry under it is a flat-plane projection. The perspective transform that bends each camera onto the ground is a homography, a fixed mapping from the pixels of one tilted camera to a patch of road seen from above, computed once for each camera against a known pattern and then applied to every frame. The processor remaps pixels from four flat images into one output by a recipe fixed at calibration time, with no three-dimensional model behind it.
The same flat-plane recipe sets a hard limit on what the picture can show. Anything with height breaks the assumption the homography rests on, so a kerb, a bollard, a trailer leg or a standing person does not land where the picture puts it. A pole grows a long smear leaning away from whichever camera caught it, and a person near a seam can stretch and lean right where two cameras hand off. The amount of stretch grows with the object’s height and with its distance from the camera. A bin close to the body barely distorts. A sign post out at the rim of the bowl, caught at a shallow angle, pulls into a long streak. An object standing where two cameras overlap can show up twice, once from each side, the two faint copies drifting apart as the vehicle rolls past. The overhead view is accurate for painted lines, kerbs at ground level and the gap to the vehicle alongside. It cannot tell a driver whether the upright object two metres out is a person or a post.
This is why nobody sells around-view as a detection system. It shows the driver the shape of the ground and how close the metal is to it. Spotting the things that move is left to the radar, the blind-spot sensors and the forward camera.
Every around-view system is born on a patterned cloth. A fisheye lens has to be un-warped and each camera calibrated against a printed cloth laid out around the vehicle, a grid of markers whose real-world spacing the box already knows. The lens bends straight lines into curves to buy its wide angle, so the software first straightens that barrel distortion, then reads the known pattern under each camera to work out exactly how that camera sits and how its view falls on the ground. If the cloth sits crooked or the tyres are soft on calibration day, that error carries into every frame the system produces afterward.
The four homographies that come out of that session are what hold the picture together, and they are only as good as the pose they were measured in. The cloth gives the box four exact maps from camera pixels to ground coordinates, computed for the vehicle standing level on flat ground at a known load. Change that pose and the maps drift. A laden truck squats on its rear axle and drops the rear camera’s aim. The same thing happens in smaller ways when a tyre runs soft and lowers one corner, or when a kerbed parking spot tilts the whole frame, and once the pose has moved the seams that lined up on the calibration floor begin to show a step where two views meet. A careful installer calibrates at the load the vehicle normally runs and tells the operator that a major suspension or camera change means doing it again.
A system can also redo some of this alignment while the vehicle moves, and how much it should is a standing trade-off. The choice between a one-time calibration and live re-stitching is the main design fork. A one-time calibration bakes the four maps in and never touches them, which is fast and predictable and wrong the instant the vehicle changes shape; a system that re-checks alignment on the fly can hide the squat of a load or the swing of a trailer, at the cost of compute and the risk of the picture wandering as the software second-guesses itself. A rigid truck usually runs the baked-in version, since its shape does not change enough to justify the rest.
Handling the seams and matching colour across them is the finishing work that decides whether the four feeds read as a single picture. Where two cameras overlap the box has to pick a seam and blend across it so a lane line does not jump sideways, and it has to pull the four exposures toward a common brightness so the bowl does not step from bright to dark across a join. Cameras pointed into different light white-balance differently on their own, and without correction the finished bowl shows four pie-slices of different tints. The blend is never clean at the corners, and a faint seam there is normal.

The around-view idea came off passenger cars, and the commercial version is a different design. The differences between heavy and light-vehicle AVM start with mounting height and never stop there. A car’s cameras sit knee-high and cover a footprint a few metres across. A truck mounts them two or three metres up, looking down a steeper drop onto a footprint several times larger, with a body long enough that the side cameras cannot hold the middle and the front of the same vehicle in one view.
A tractor unit changes its shape every time it swaps a trailer.
That single fact reshapes the whole problem. A rigid van behaves like a big car, and the maths carries straight over. A tractor is the hard case: with a swapping fleet of trailers it has no fixed rear body to calibrate against, and the back of the picture belongs to a unit that was not there an hour ago. Heavy-vehicle systems answer this with cameras that know which segment they ride on and a layout that can grow a trailer panel, a different engineering job from a hatchback’s tidy four-camera ring. The cab cameras are the easy, settled part. Almost all of the hard work in a commercial system goes into the trailer view.
Everything the stitch depends on assumes the four cameras hold a fixed pose relative to one another, and an articulated vehicle breaks that assumption the instant it turns. On a tractor and semi-trailer the cab and the trailer pivot around the kingpin, so a camera on the trailer swings through a wide arc relative to a camera on the cab, and the two halves of the overhead picture that lined up on the straight no longer belong to the same rigid frame. Stitching across the articulation joint is the hardest geometry in commercial around-view, because the homographies were each measured for a single static pose and there is no longer one pose to measure: the trailer’s ground map rotates about the kingpin while the cab’s sits still. A system that ignores this shows the classic failure, a trailer panel tearing away from the cab panel mid-turn, the painted lines stepping sideways at the seam and a single kerb drawn twice. The fixes that work are all compromises. The cheapest drops the stitched bowl once the steering angle or an articulation sensor says the rig has bent past a few degrees, falling back to a plain single-camera view of the trailer side. A better one feeds the live articulation angle, read from a sensor at the fifth wheel or estimated from the trailer camera’s own image, back into the trailer homography and re-warps that segment frame by frame so it keeps meeting the cab segment as the rig bends, which costs compute and a calibration of where the pivot sits and degrades the moment the estimate slips. Then there are the rigs that carry more than one joint. Switching the view across a multi-trailer body, a drawbar combination or a B-double, gives up on one seamless bowl and instead hands the driver the segment that matters for the manoeuvre, the front bowl while pulling away and the relevant trailer’s nearside while it tracks through a turn, because no single overhead image of a thirty-metre combination can get every joint right at once. A drawbar trailer adds a second pivot the cab cannot see, and a dog trailer behind it adds a third, so the picture becomes a set of separate views the box switches between, with no single stitched whole on offer. This is the line where commercial around-view turns into its own discipline, and it is the part a buyer should press on, because a vendor whose demo truck is a rigid two-axle box has shown only the easy half of the problem.
The stitch is only as good as the four pictures feeding it, and the worst of the four sets the quality of the whole bowl. Optimising AVM for night and low light is mainly a fight against four cameras that each see a different amount of light: the front lit by the headlamps, the sides catching a street lamp or nothing, the rear washed out by a following vehicle’s beams or sunk in black. The box has to raise the dark quarters without pushing the lit ones into glare, and keep sensor noise in the shadows from boiling into the blend. The corners where two different exposures meet are where night stitching shows its seams worst. Reversing lamps and a few low side LEDs earn their place here by giving the cameras a base of real light to work from.
Weather goes at the lenses directly. In rain and snow the picture degrades as water beads on the downward-facing glass, road spray films it grey and a low winter sun glares straight into a wet element, and a camera under a mirror catches the worst of the spray thrown off the front tyre. The software can stretch contrast and lean on the cleaner cameras, and a sensible install puts the lenses where the body shelters them and keeps a habit of wiping them, because no amount of processing rebuilds detail the water has already smeared off the glass. Drivers who run these through winter soon learn which camera goes blind first in spray.
Latency is the hard constraint on a moving vehicle. Frame rate and latency in the stitch count for more than picture polish, because the driver is placing a moving body against a kerb or a cyclist in real time, and lag between wheel and picture breaks the hand-eye loop the tool runs on. Blending four channels into one image every frame is heavy work, and the aim is to hold the delay low enough that the picture stays welded to the vehicle, which is why the stitch runs on dedicated silicon.
The overhead picture earns its keep when the other sensors draw on it. Fusing the AVM with the active-safety warnings drops the radar, blind-spot and driver-camera alerts onto the one view that shows where they sit around the body, so a blind-spot hit lights up the right rear quarter of the bowl and the driver reads threat and location in a single glance at the screen. This is the answer to the height problem the overhead view is built on. The around-view contributes the geometry. The detection sensors find the objects that have height, and the fused screen carries both. Through that fusion the overhead picture becomes one panel of the vehicle’s wider safety system, and the safety alerts share that same screen.
None of this shows on a showroom loop. A demo of an around-view system on a clean rigid truck in good light on a flat floor is showing the half of the job that was solved a decade ago on cars. The questions that matter are all about the hard half: what the trailer panel does mid-turn, how the picture holds at dusk in the wet, how long after the wheel moves the screen catches up, and whether the seams stay quiet at the load the truck runs.
A buyer rarely needs to take any of this apart on a bench. It is enough to mount the cameras where the body shelters them and to calibrate at the load the truck normally carries, then read a faint seam or a dropped trailer panel as the system working inside its limits. The screen earns its place for a driver who understands what it is doing.








